Rome, Italy
Robotics · 3D Vision
3D Vision & Robotics Researcher
Ph.D. · Former Postdoc · Industry Researcher
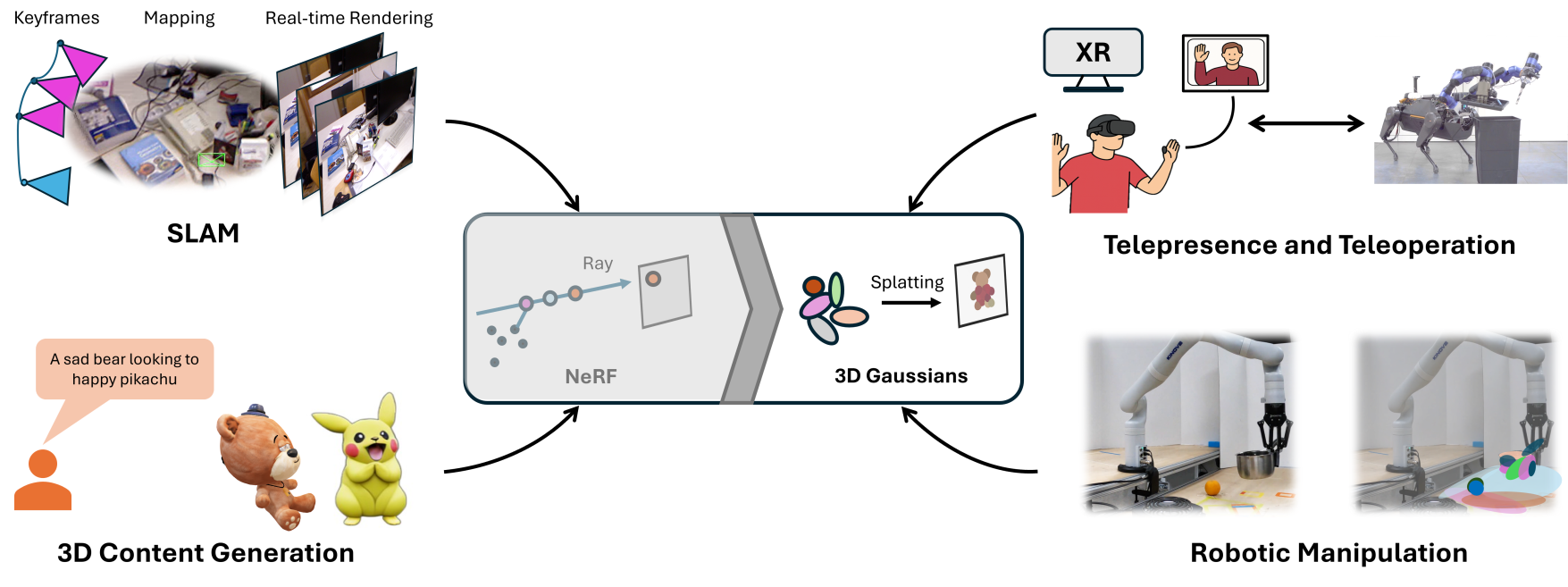
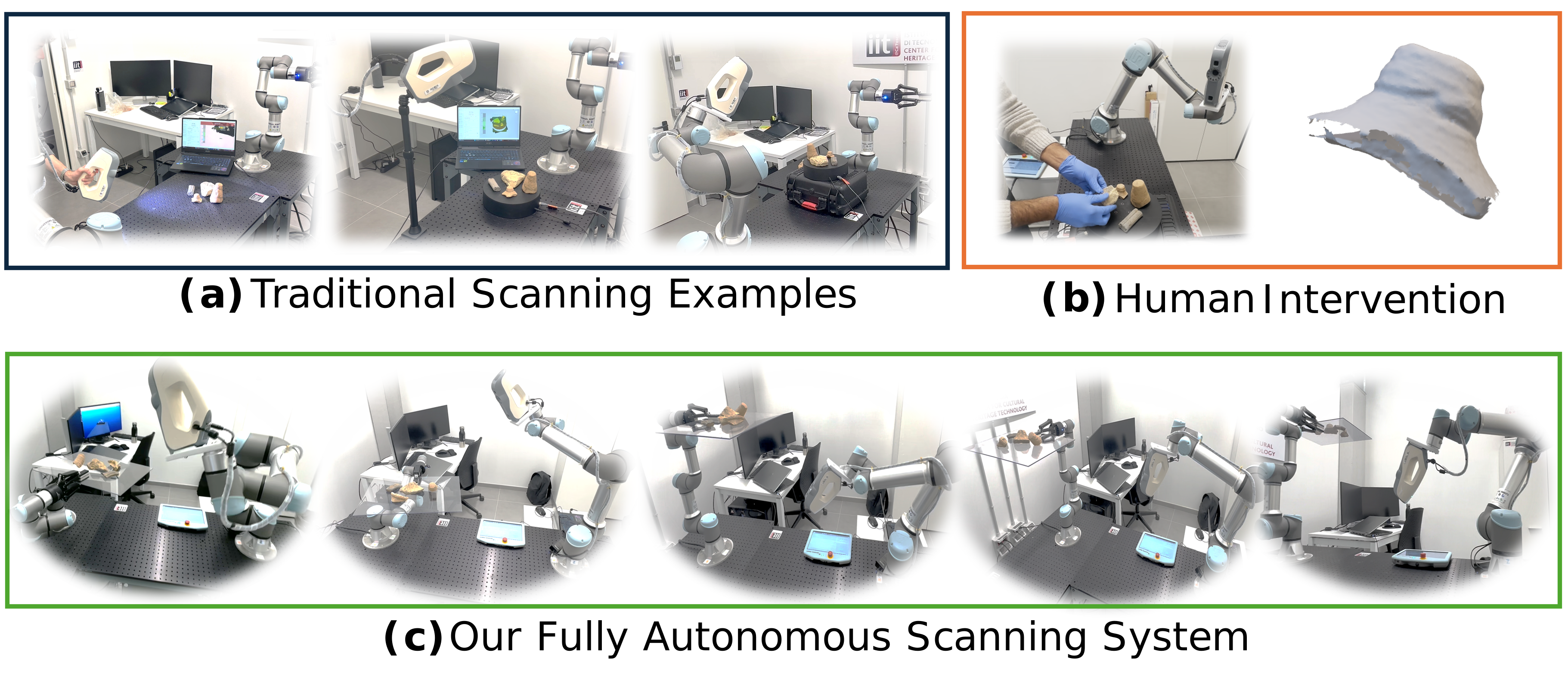
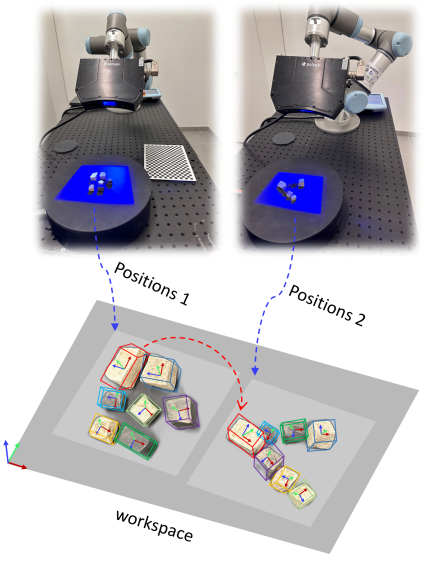
I build end-to-end autonomous systems at the intersection of SLAM, active 3D perception, and robotic platforms (mobile manipulation). Previously at the Italian Institute of Technology (ADVR & CCHT), and currently in industry developing 3D vision systems.
Focus
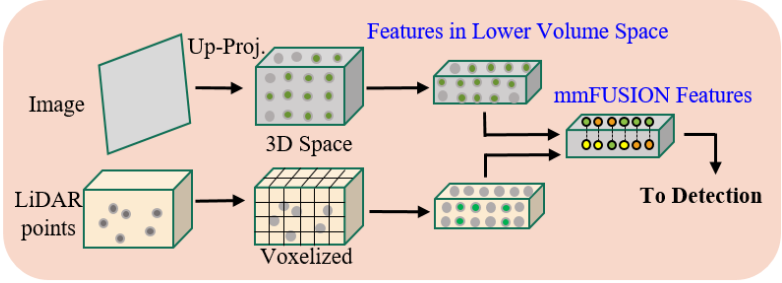
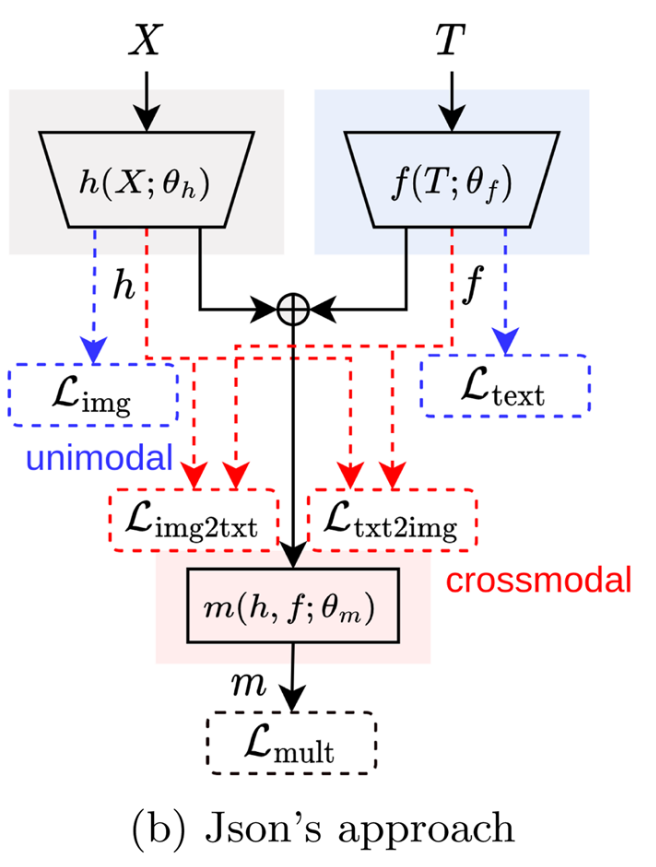
SLAM · 3D mapping · neural scene representations · multimodal fusion · real-time autonomous systems.
Highlights
1st prize: VISUM 2021 & EEML 2020 summer school.